Senior Design Project EE 400 D: Low Frequency Sound Fire Extingisher
CSULB College of Engineering Senior Expo 2025 Electrical Engineering 1st Place and Green Generation Showcase 1st Place
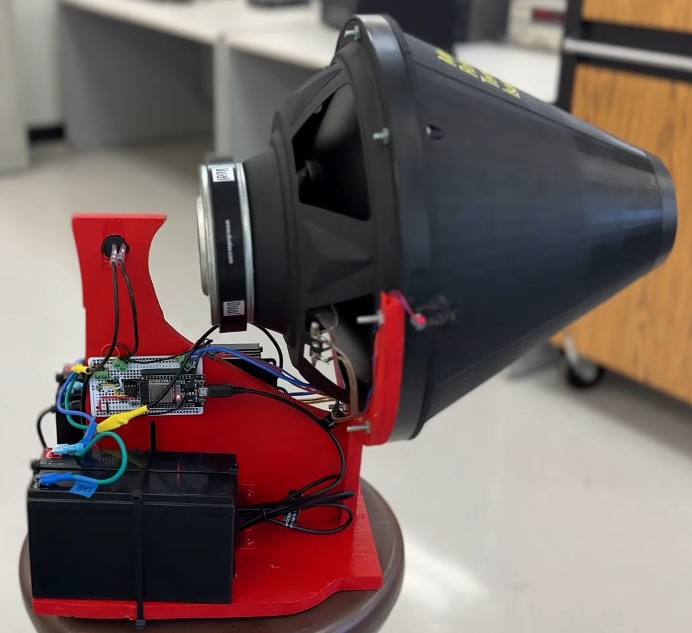
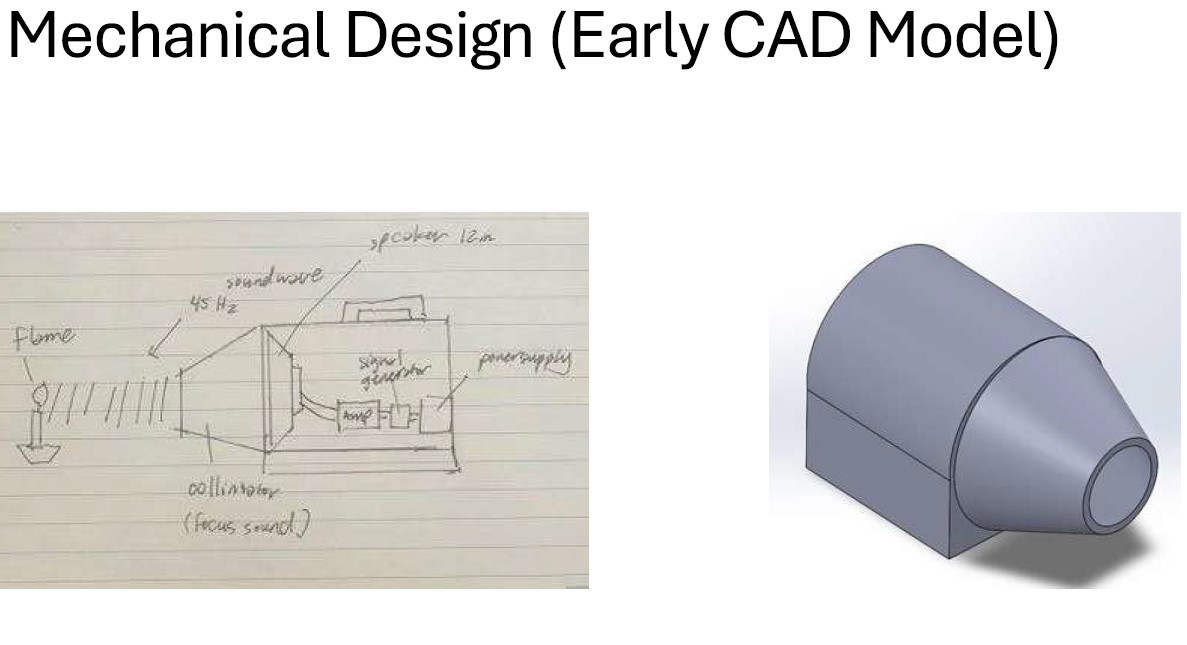
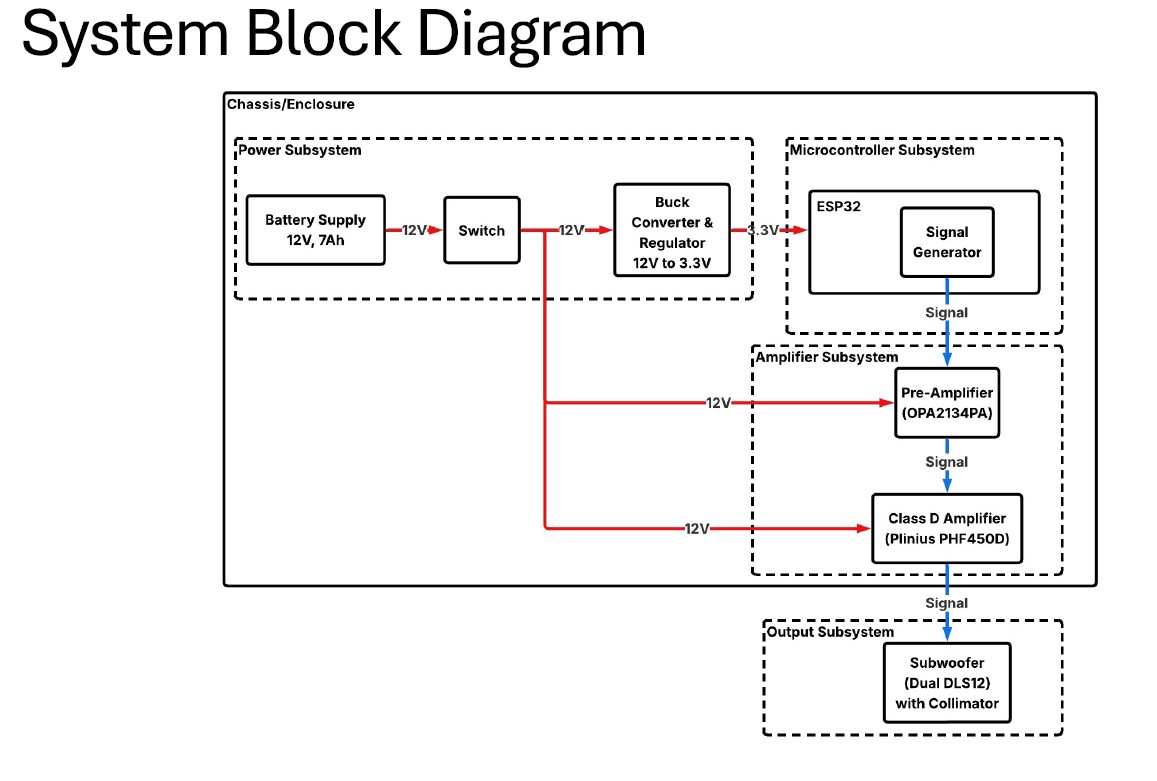
Wildfires in California have become increasingly destructive, exacerbated by water shortages that limit traditional fire suppression methods. Our LFSFE offers a sustainable, water-free alternative by using acoustic waves (30Hz–70Hz) to disrupt combustion. This eco-friendly solution addresses early-stage fire suppression, reducing reliance on water and chemical retardants that contribute to environmental degradation.
Key highlights of our project:
Sustainability: LFSFE minimizes environmental impacts by conserving resources and reducing emissions from fire damage.
Portability & Ease of Use: Designed for effective fire suppression through precise acoustic energy delivery.
Our prototype surpassed expectations, extinguishing a candle flame from 2 meters in about 7 seconds! It also put out a pan fire at 4 ft in less than 14 secs and our portable version put a pan fire 12 inches away at 6.45 secs. Powered by two 12V, 7Ah lead acid batteries, the LFSFE is a testament to innovative engineering and sustainability.
A huge thank you to our team and CSULB for the opportunity:
Robert De Los Santos
Marvin Campos Real
Isaac Vazquez
Terence Joseph Reyes
Professor Christopher Hirunthanakorn
Dr. Saleh Al Jufout
We are proud to represent California State University, Long Beach's Department of Electrical Engineering and contribute to a cleaner, more resilient future
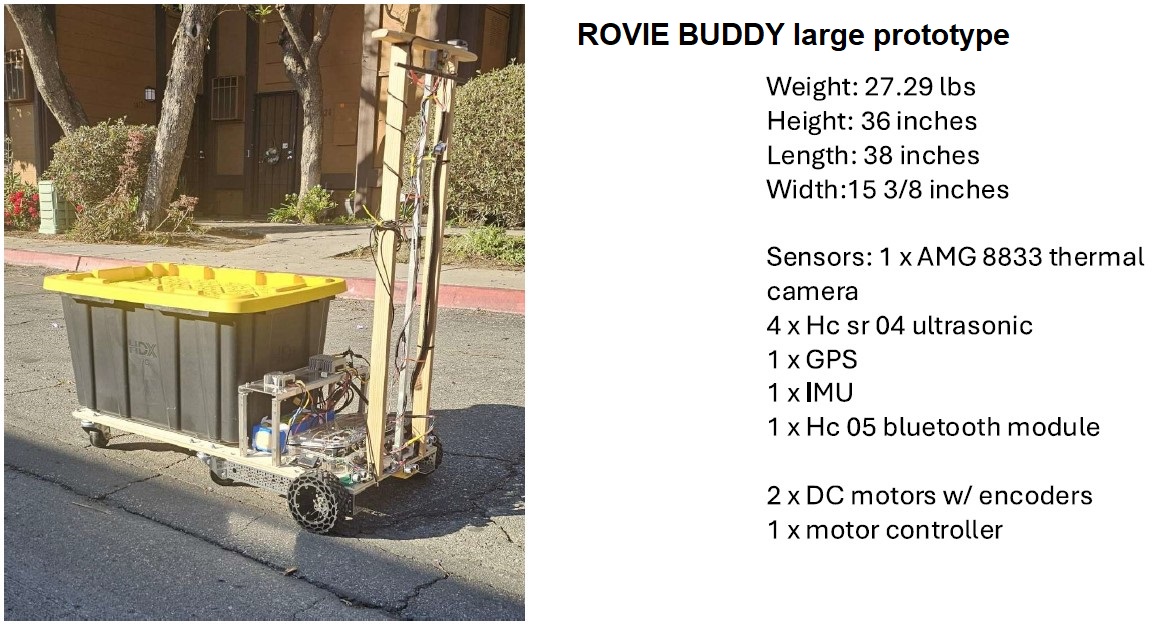
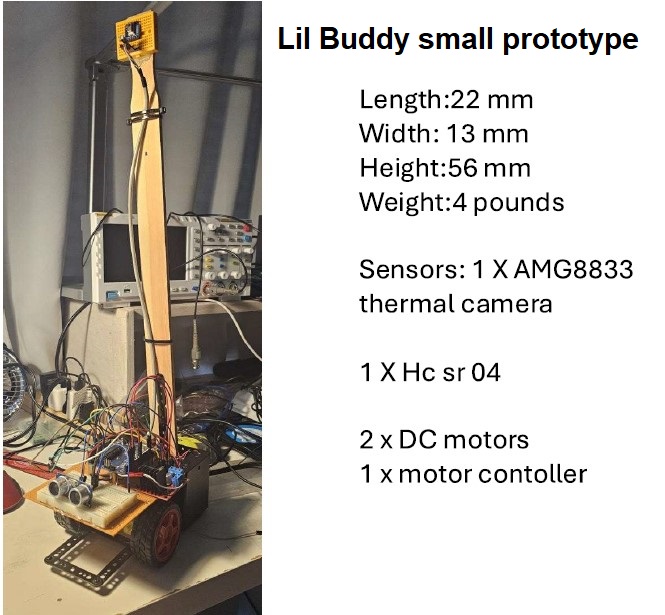
Senior Design EE 447: Human Follow Cart "Rovie Buddy"
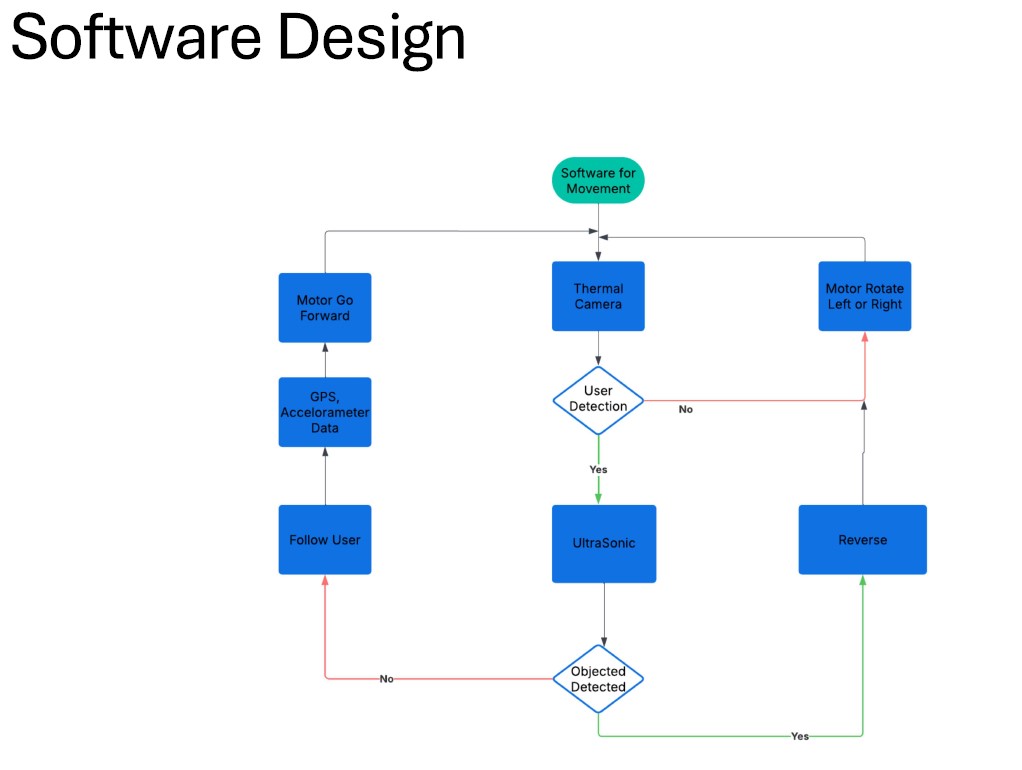
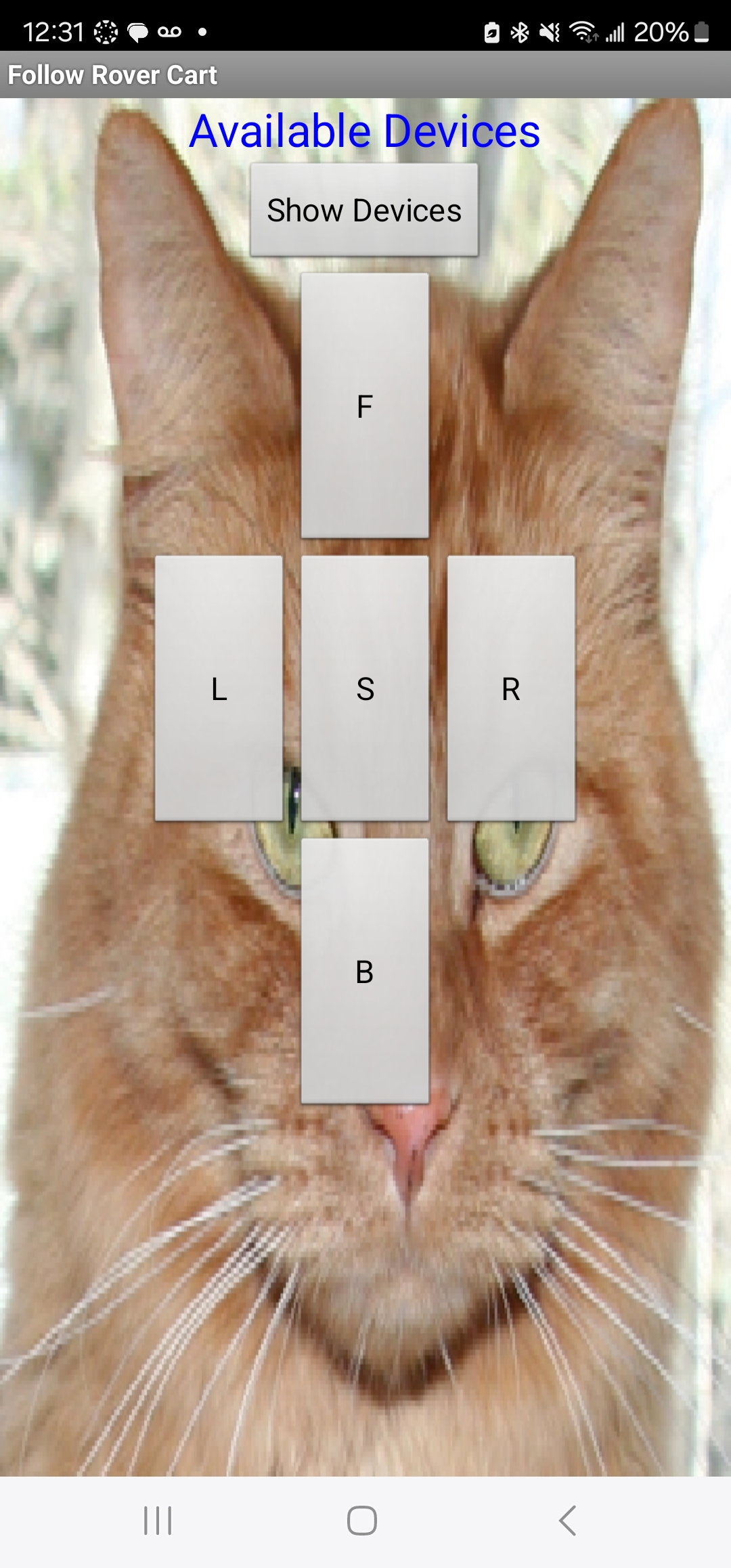
The Rovie Buddy is an autonomous, user following robotic cart designed to assist individuals by carrying their items while maintaining a consistent distance from the user. The rover incorporates intelligent tracking, thermal optics, obstacle avoidance, and user-friendly controls, making it an ideal solution for carrying groceries, golf clubs, beach gear, or other personal items.
For my Project I created two prototypes, A small and large. The small prototype tested the thermal camera human tracking, ultrasonic distance and obstacle avoidance as a proof of concept. The large prototype was a full scale model with both thermal tracking and obstacle avoidance, bluetooth control, GPS, distance tracking, and imu.
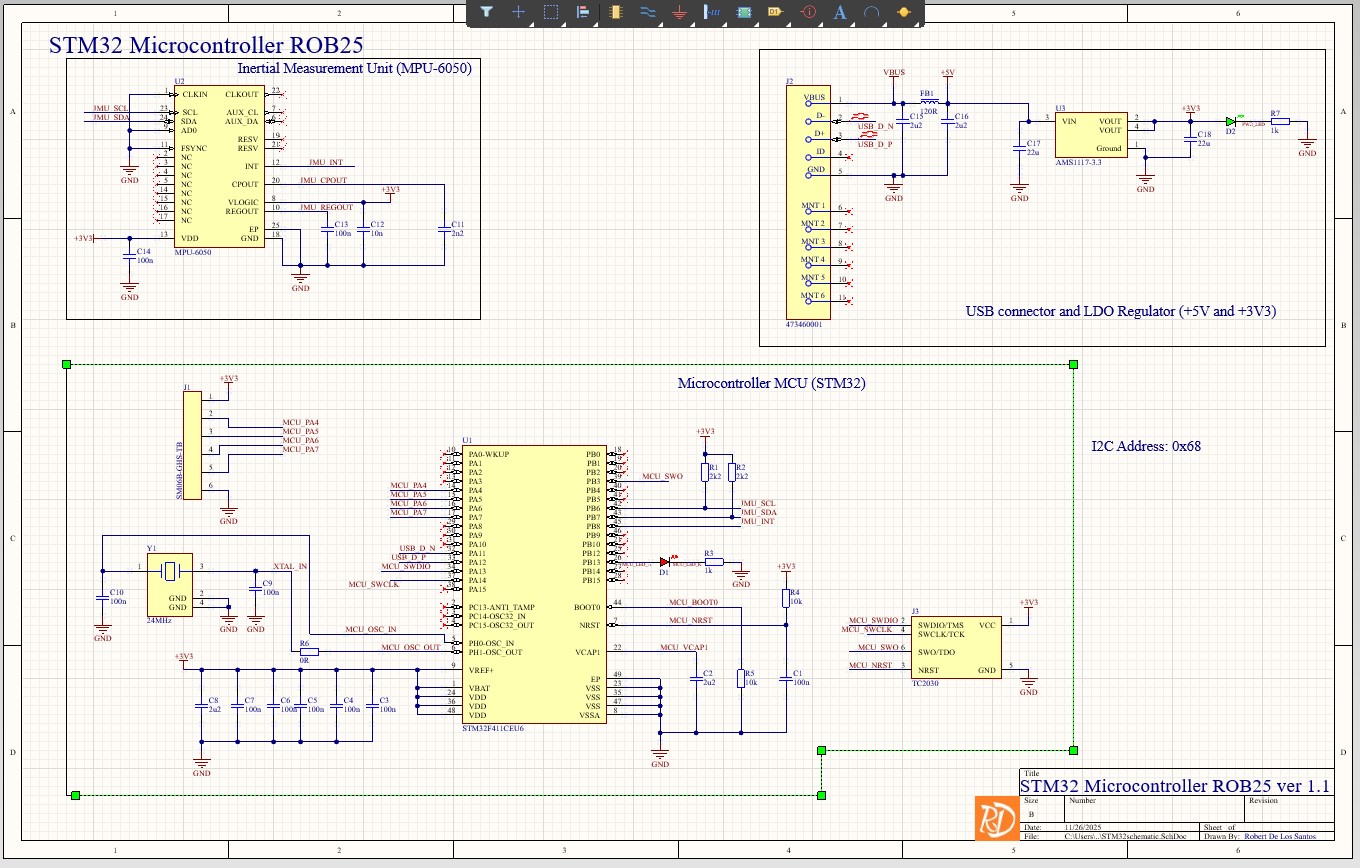
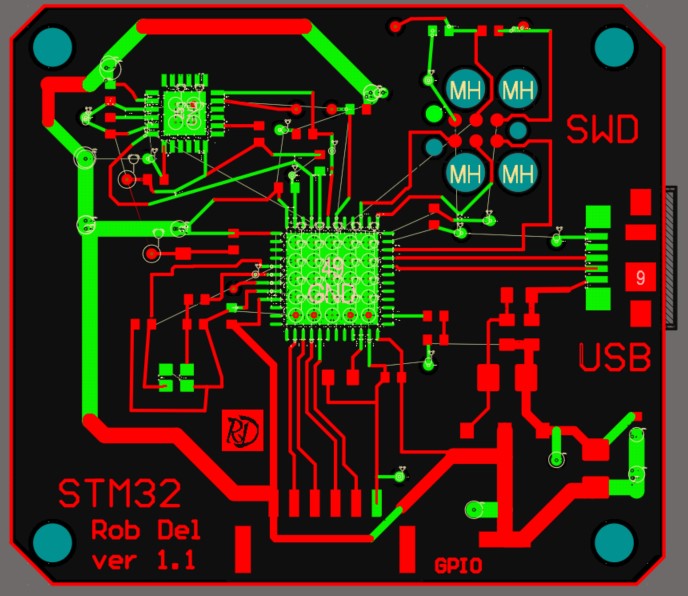
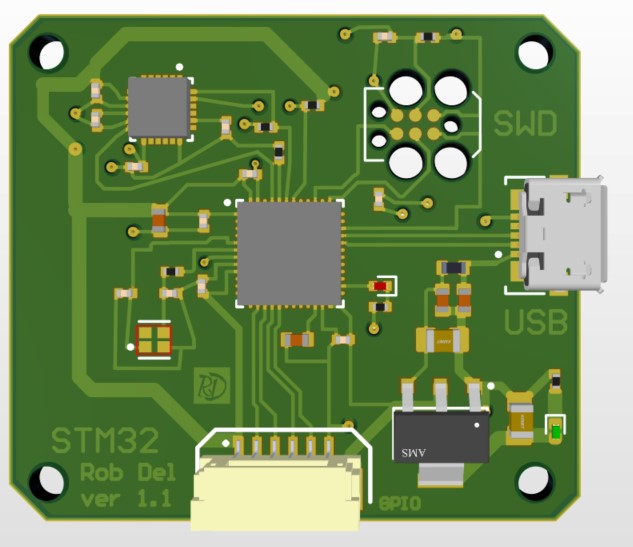
Design of 4 layer STM32 PCB in Altium
This is a recent board I designed in Altium. Its a 4 layer PCB for an STM32 microprocessor, USB, MPU-6050, and AMS1117. I used a STM32 Nucleo at university to run assembly code, but I wanted to design my own version and program it with C. I am planning to make my version after reviewing my PCB design.
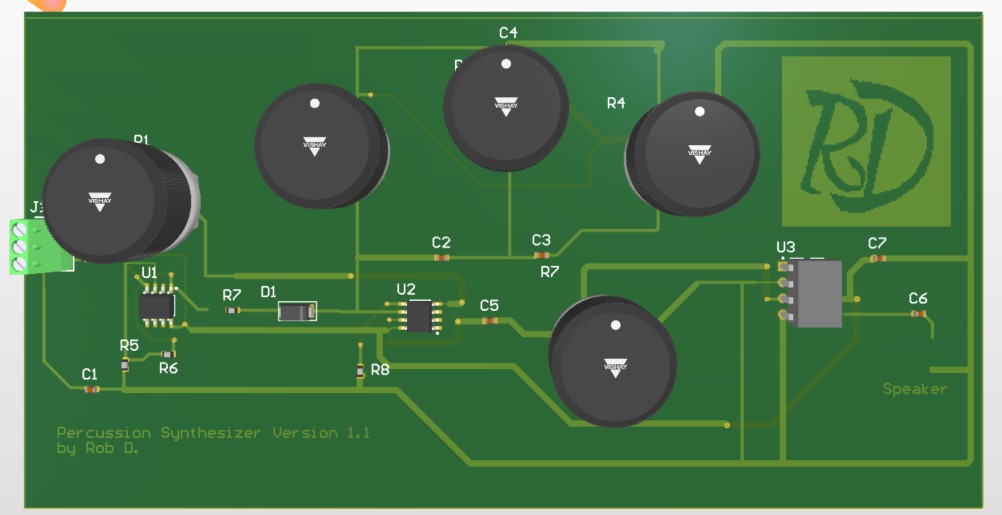
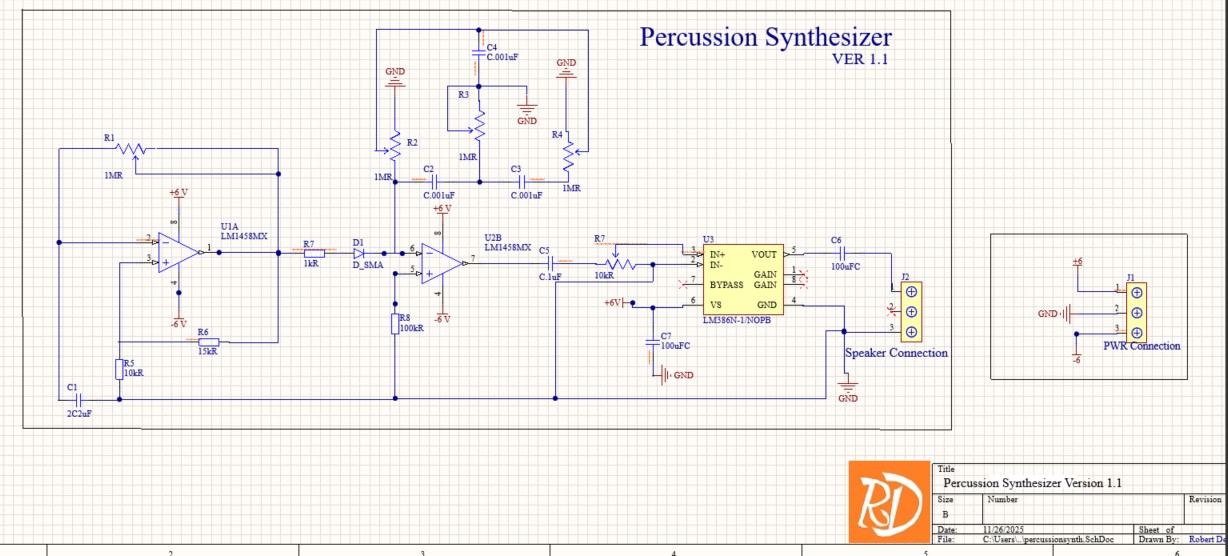
Design of Percussion Synthesizer PCB in Altium
This is a board I designed in Altium. This PCB was inspired by one of the schematics from Forest Mims Engineer's Mini Notebooks. It is a percussion synthesizer I want to build. I want to find the right terminal for the speaker connections so I put a placeholder in the schematic but I will probably change it on the actual build.
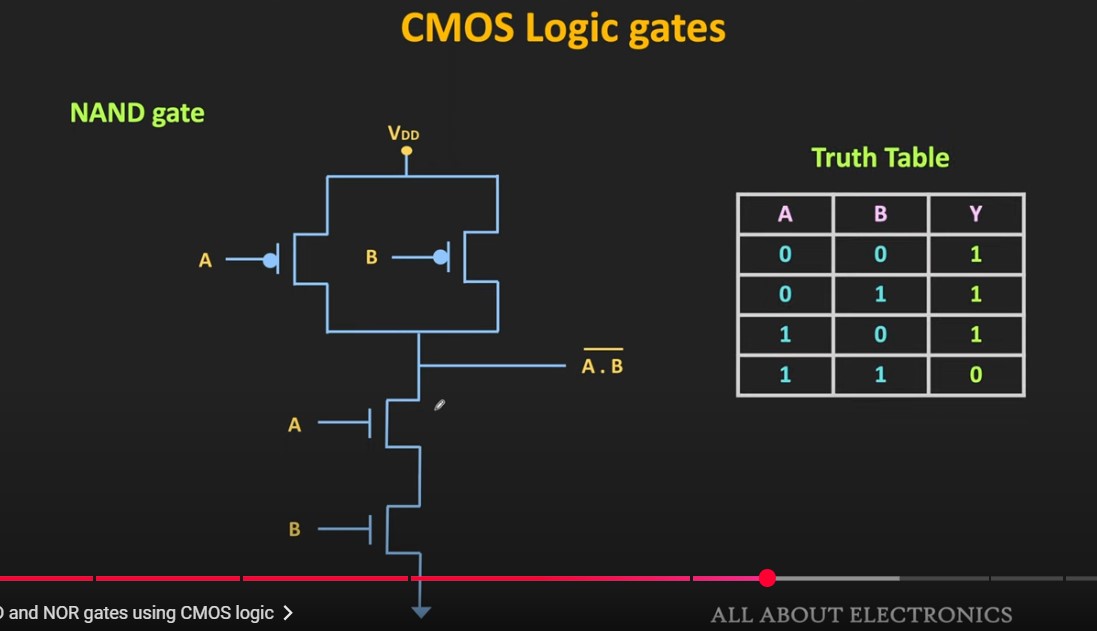
CMOS Nand Gate in Multisim Explainer
One school project I had was explaining a CMOS circuit. I explained a CMOS Nand Gate in multisim with the truth table digital logic demonstrated.
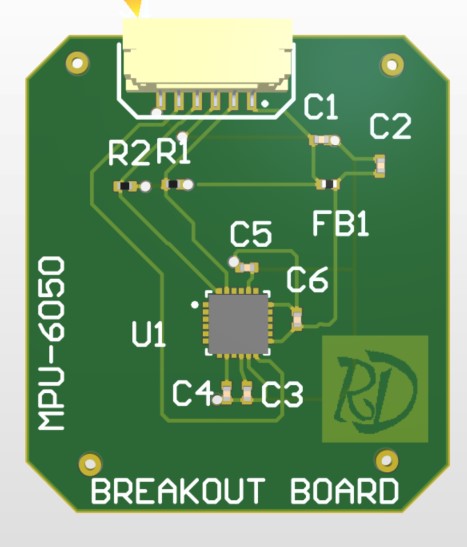
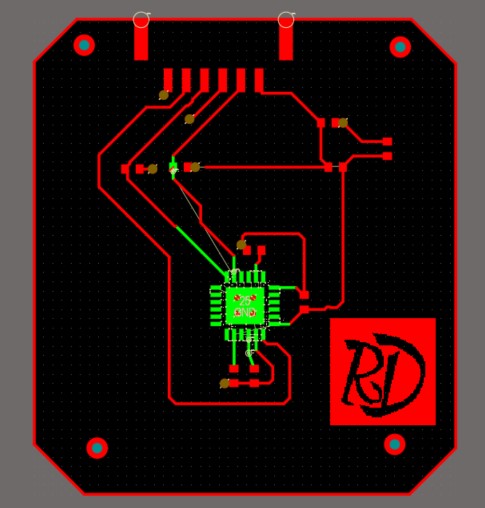
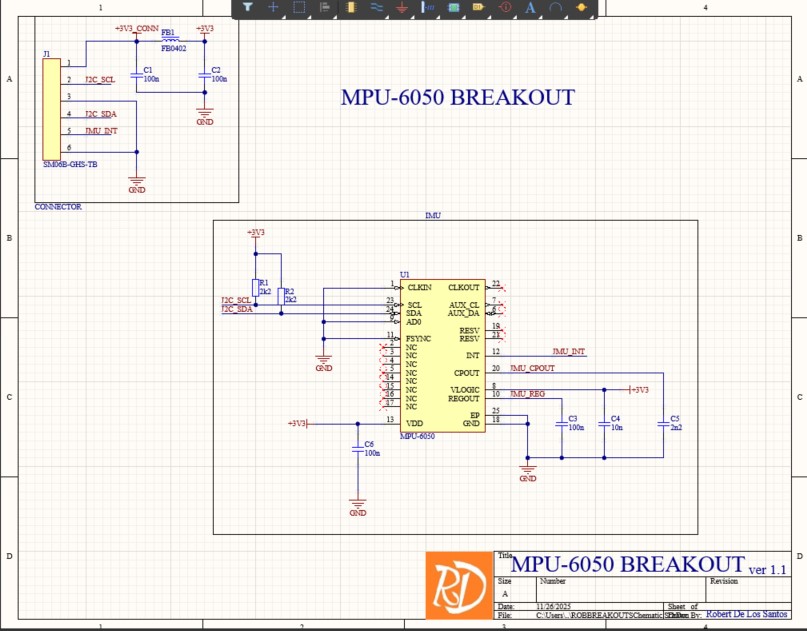
MPU 6050 breakout board,Light Transmitter and Receiver in Altium
Here I created a breakout board in Altium for the imu MPU 6050 and also a schematic of a light transmitter and reciever. The MPU 6050 is an accelerometer and gyro chip. I designed a module which contains the ic and can be used with a microcontroller.
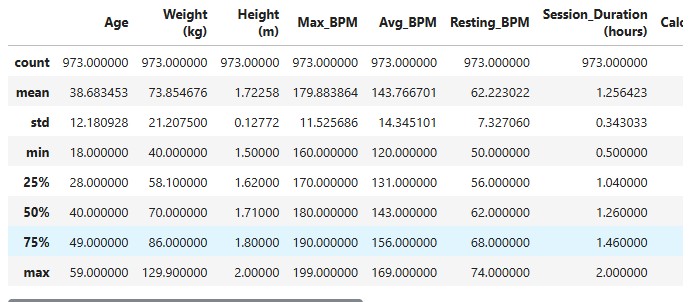
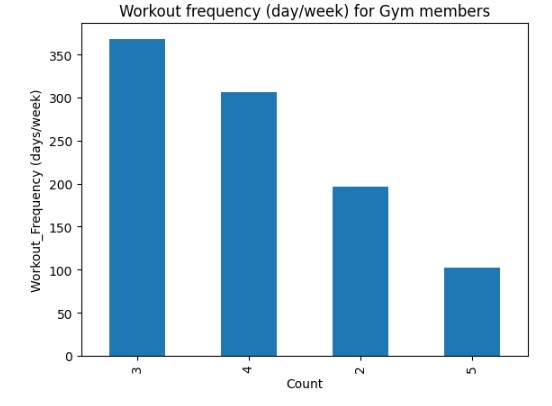
Data Science practice
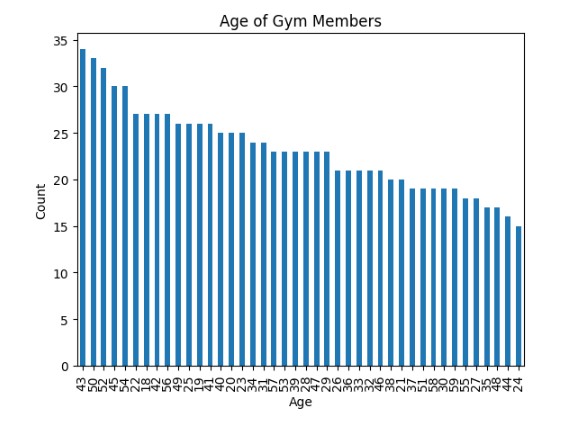
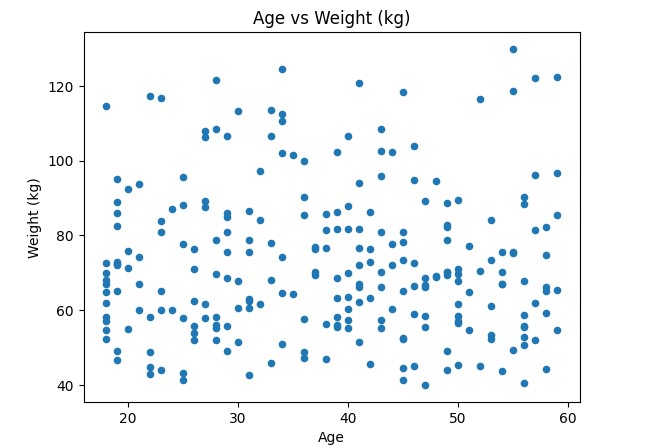
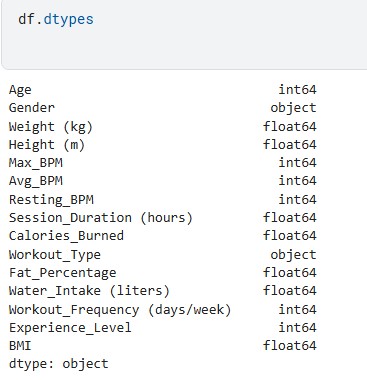
In this project, I demonstrate EDA (Exploratory Data Analysis) of gym data found on kaggle using jupiter notebook and python. Here I display data visualizations and list the datatypes within the csv of gymdata.
From the data we see that out of the 973 members of the gym, The number of 43 year olds is the highest at 34 people and number of 24 year olds is at 15 members. From this data, we can target Ad campaigns to more 24 year olds to join the gym to increase membership at that age or add exercise classes that 43 year olds like because they are the most likely to use a gym because of health reasons and buying power.
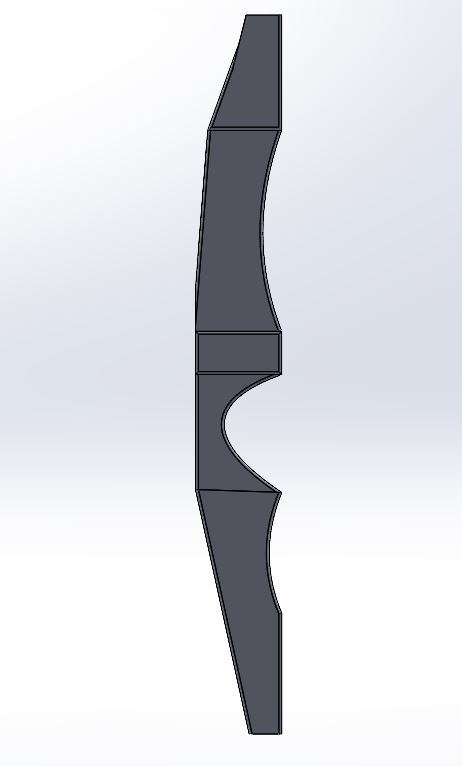
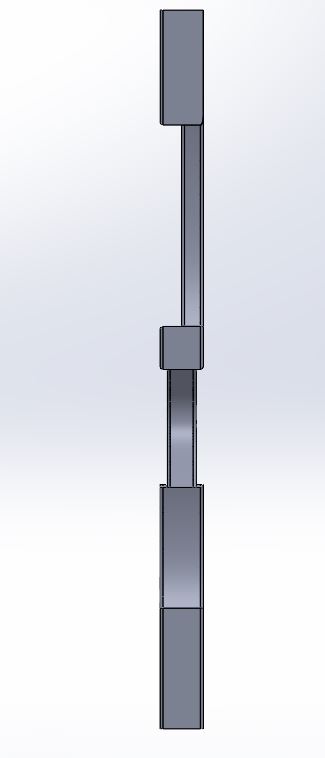
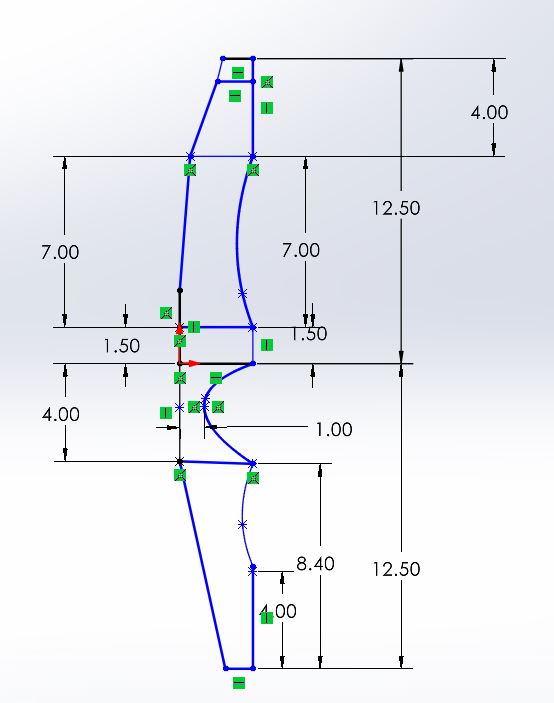
CAD of recurve bow riser for archery
In this project, I created an archery riser which I will try to make when I have freetime. Archery is one of my favorite hobbies to relax to when I am not building electronics.
CSULB Zero Emission Vehicle Certification 110-Hours
During the Spring Semester of 2024, I participated in the ZEV program. The CSULB ZEV program covers 110 hours of Electric Vehicle training and is sponsored by the State of California Energy Commission.
CPIE212-Introduction to Zero Emission Vehicles
Introduction to Zero Emission Vehicles, including the digitally networked bus battery management system in a traction battery and on the corresponding components, LIDAR in automotive, Gesture control and capacitive touchscreen in the motor vehicle, CAN/LIN monitor, Parking Assistance System using Rear-view Camera, and Adaptive Cruise Control (ACC) with Emergency Brake Assistant.
CPIE213-Energy Conversion and Storage
Electromechanical energy conversion. Power transformers. DC, synchronous, and induction machines. Energy storage types and efficiency. Practical experiments on rotating machinery.
CPIE214-Electric Vehicle Fundamentals
Electric propulsion systems for electric vehicles. DC and AC motor drives. Brushless DC motors. Switched reluctant motors. Energy storage systems including batteries and supercapacitors. Electric Vehicle Mechanics and Drivetrain.
CPIE215-Motors and Controllers in Electric Vehicles
Characteristics of semiconductor power switches. Modeling and application of control theory to various types of motors. Bidirectional and four-quadrant converter topologies for motion control. Selection of drives to control AC and DC motors. Uninterruptible power supplies and adjustable speed drives.
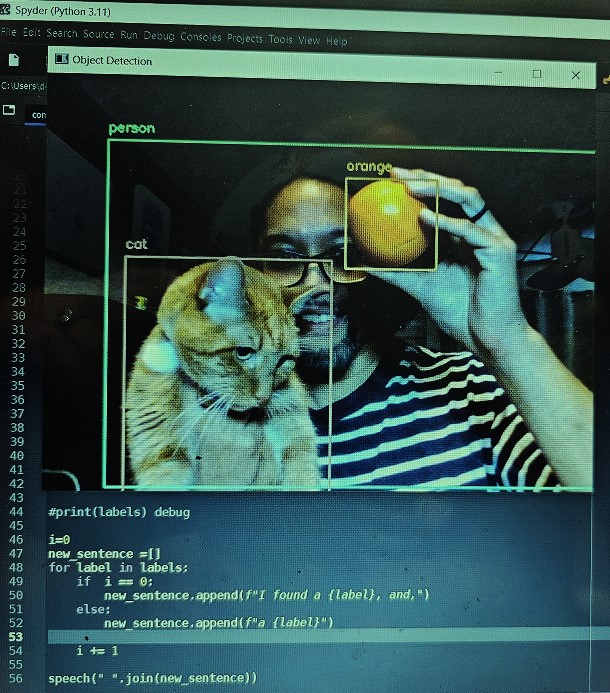
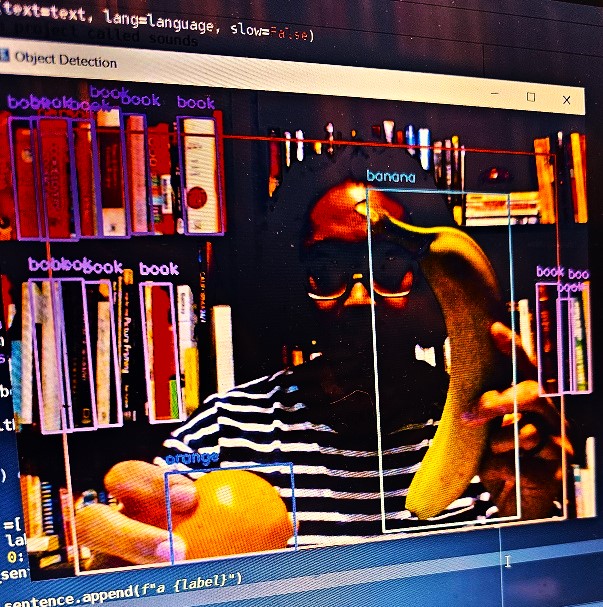
Object Recognition using opencv and python
In this project, I created a program using python and opencv to use optical recognition to describe objects on the camera using text in a box and speech.
From the program you can see it recognized a person, cat, banana, orange,
and various books.
CSULB Nasa Big Idea Challenge 2024
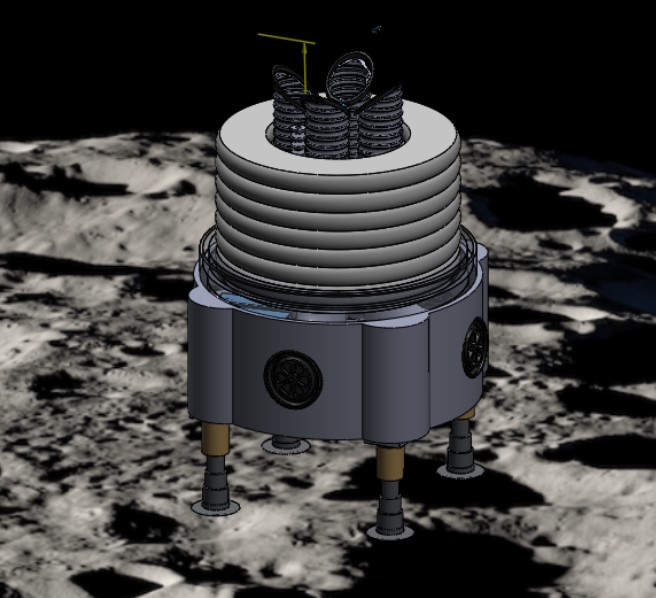
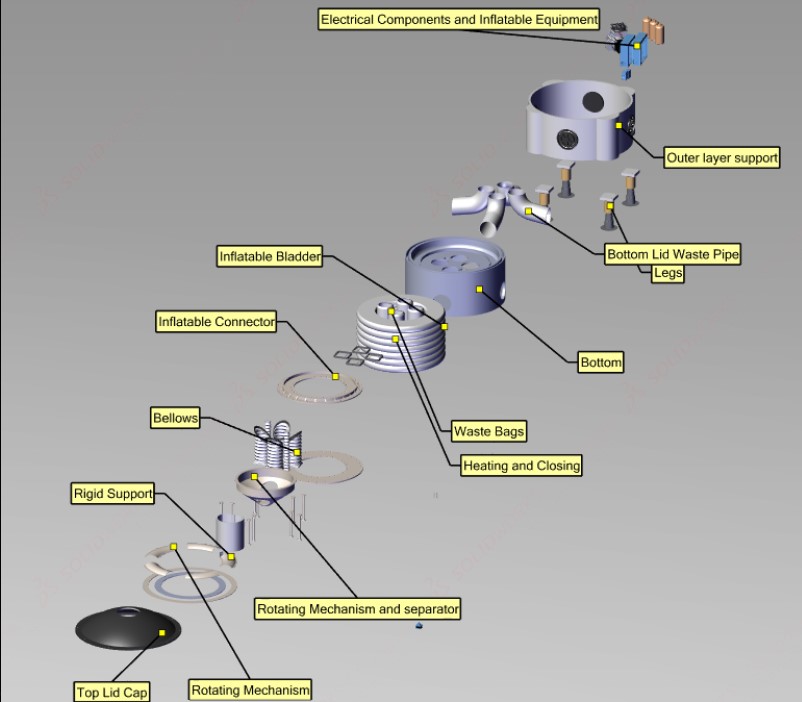
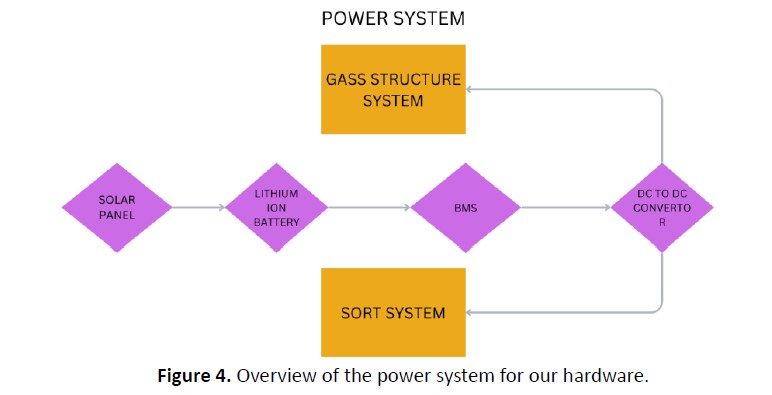
In this project, I was part of a team that was responsible for the electrical hardware system for my university's Nasa Bid. Here is the brief bio. A robust waste management system is crucial for space exploration. The impending challenges faced by astronauts upon arriving on the Moon, devoid of any infrastructure, necessitates innovative solutions for immediate waste management. Our proposed inflatable waste management system, developed for the 2024 BIG Idea Challenge, aligns with NASA's Lunar Surface Innovation Initiative and Space Technology Mission Directorate goals to develop foundational technologies and approaches needed to fulfill the Artemis missions. Our semi-autonomous solution, equipped with color sorting capabilities, addresses disposal challenges on the lunar surface. Strategically stationed and anchored, it uses real-time data from sensors for deployment. The inflation process is managed by electronic valves and gas pumps for optimal pressure. The color sorting system employs a camera connected to a Raspberry Pi, and bags are sealed with a heating element for safe removal. Focusing on in-situ resource utilization and incorporating waste management tools, our solution supports the Artemis program's vision for a sustainable lunar settlement.
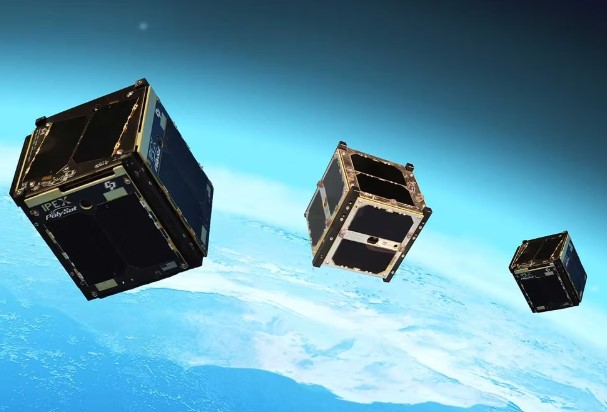
Cal State Long Beach SharkSat-1 Team (Subsystem Communication) Electrical Engineer Jan 2025 - June 2025
In this project, I participated in the CSULB SharkSat-1 program as an Electrical Engineer for Communications.
I performed student project work with NDA requirements doing trade studies for components of the cubesat communication system and link budgets.
For more information please refer to
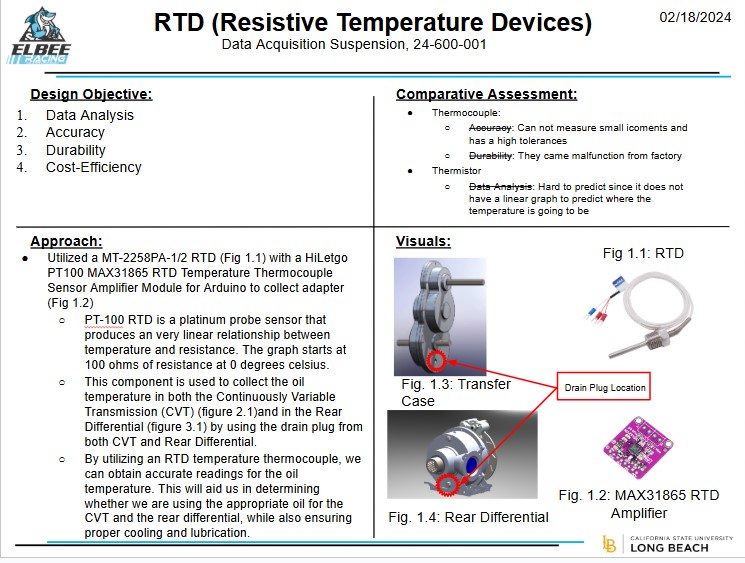
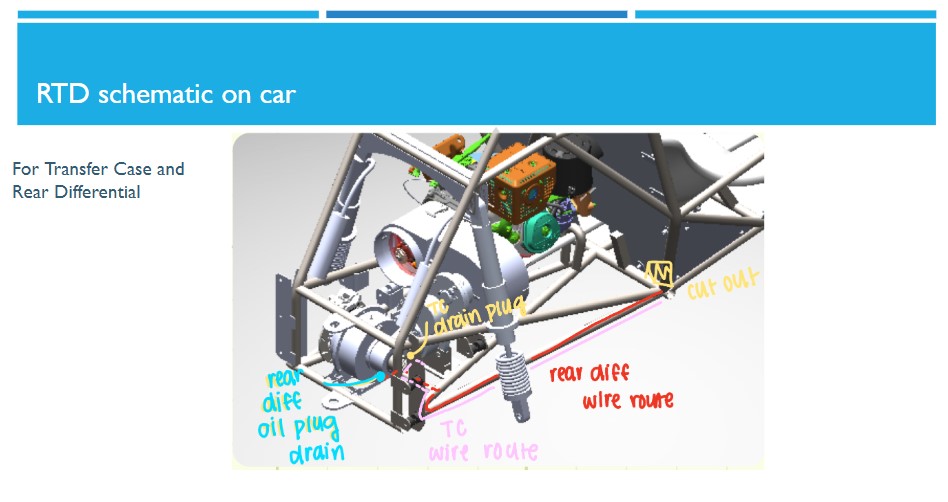
Cal State Long Beach SAE Elbee Racing BajaCar Jan 2024 - August 2024
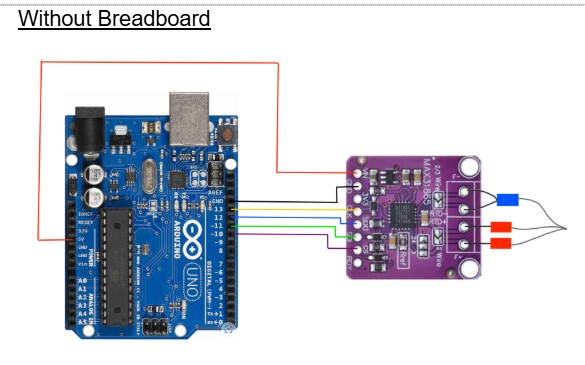
In this project, I was on the data acquistion team for the Cal State Long Beach SAE Elbee Baja Car. My team's role centered on the RTD(Resistive Temperature Devices) that measured the oil temperature on the Rear Differential and the Continously Variable Transmission. We attached thermocouples that worked with the MAX31865 RTD Amplifier module while attached to an arduino.
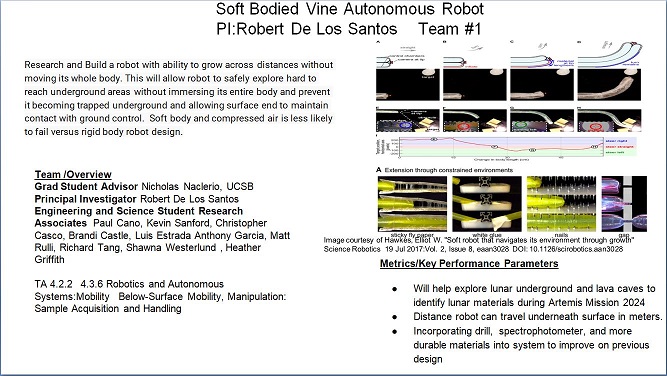
Lunar Soft Vine Robot
Within NASA L'space proposal writing certification, I served as Principle Investigator to write a proposal to solve the task of exploring lunar lava caves for the Artemis mission. Our project was called the Lunar Soft Vine Robot for subsurface Exploration. Though our team worked hard to find a feasable solution to explore lunar lava caves on the moon, our mission was not awarded the task. However, I learned a lot leading the team through researching the task, solutions, making contacts with subject matter experts, assembling and assigning tasks to the team, constructing a time line with feasible deliverables and goals, and tallying the bill of materials to achieve the project. This is the abstract of our project.
A thorough exploration of the lunar subsurface is necessary to find the resources needed to maintain a permanent human presence on the moon. To fulfill the goals of NASA’s technology roadmap TA 4: Robotics and Autonomous Systems (4.2.2 Below-Surface Mobility and 4.3.6 Robotics and Autonomous Systems: Manipulation: Sample Acquisition and Handling), a team of students proposes the use of a soft-bodied vine-like robot. State-of-the-art lunar rovers function effectively on the moon’s surface, but they face many challenges in subsurface exploration, such as mobility and body damage. These challenges are partly due to the design constraints of a rigid robot. Soft vine robots are a technological leap forward in design to undertake the task of exploring the subsurface here on earth. They have the ability to grow distances underground, extending only at the tip while keeping the majority of the robot body stationary. Its soft body construction allows it to be flexible, durable, and maneuverable underground. These characteristics will make the soft vine robot an excellent addition to NASA’s robot exploration team. Our purpose is to use the soft vine robot technology will be adapted for use in NASA’s Artemis missions. A student team will build a prototype to test the suitability of materials, tools, and components needed for the robot’s success.
From this project I gained my proposal writing certification from NASA and the LSpace Academy.
NASA spaceapps hackathon challenge
This project was my first Hackathon I participated in. It was the Nasa Space Apps Hackathon where I was tasked to work with people I never met before to solve a real world problem. Here we created an app in three days, made a working prototype, and presented it to NASA science/engineer judges panel. If selected a angel investor would fund the project. Our team tried to address the spot the fire challenge https://2018.spaceappschallenge.org/challenges/volcanoes-icebergs-and-asteroids-oh-my/real-time-fire-app/details/. We took the task of trying to solve evacuations from wild fires here in california by creating an app called pyromatics that showed users where they were relative to an active fire, emphasize evacation zones, and used crowd sourced reports to generate evacuation center and gave status updates via rss feed. The app intergrated google maps and geo-location API. Though we made a valiant effort, we were not selected as recipient of the award. From this experience, I learned how to work with strangers to complete a task, my skills at website building vastly improved, and it also taught me that I can rely on others.
NASA Community College Aerospace Scholar
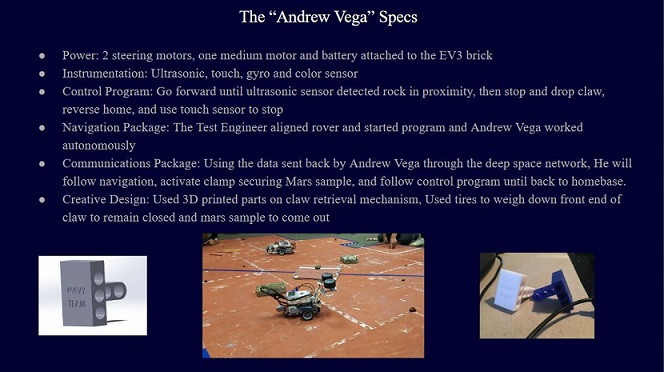
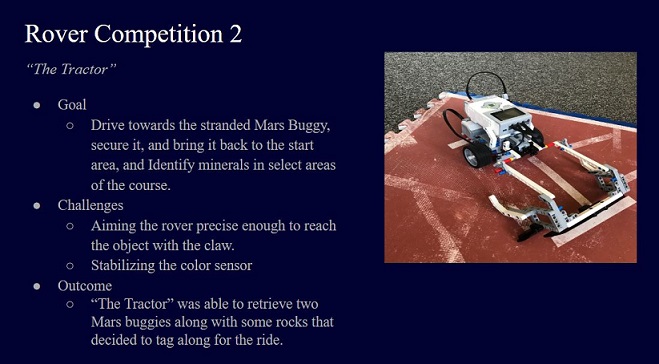
During my time as a Nasa Community College Scholar, I was one of the lucky few to be Selected to travel to the Nasa Ames Research Campus in Silicon Valley for an onsite tour and a student project consisting of other students from around the country. Though the project consisted of making a lego robot, the approach was using nasa methods to complete a simulated mars rover mission, from planning the mission, working as team and assigning deliverables, and executing the mission to collect, rock samples. I was part of the engineering team to design an efficient rover to collect samples. During the week, the whole experience was amazing, It was the first time I had ever went to an onsite Nasa site. I got to see one of largest wind tunnels where they test everything from parachute deployment to aerodynamics of vehicles, the exobiology lab, and a cockpit simulator. Here I made lasting friends with students and I also got to have lunch with Nasa engineers. One in particular I met was a NASA safety engineer, who had a hawaiian t-shirt with sail boats on it. I happen to mention that I built a sailboat and we got into a whole discussion about sailboat building and design and how Nasa Ames Research had a sailing club. This is one of my favorite experiences becoming an engineer.
Virtual lock on FPGA board
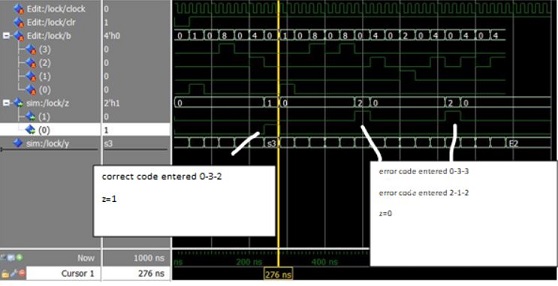
In this project, I used a FPGA to construct a digital lock with VDHL. The lock had four buttons where a three-digit code was used to unlock it. If the correct secret code 0-3-2 was entered, the LED LD0 on the FPGA board would light up, if an incorrect code was entered the LD7 led on the board would light up. Using this design, the state machine algorithm, diagram, and VDHL code was developed and I was able to create a functional digital lock in simulation and also on a FPGA board.
Overall, this was an interesting project because it contained many parts including two submodules from the main VDHL code which was entered in vivado and debugged. The testbench was created in a Questa simulation. The final part was testing on the FPGA itself from vivado once again. The final lock opened when the correct code was entered and remained locked when the correct code was entered.
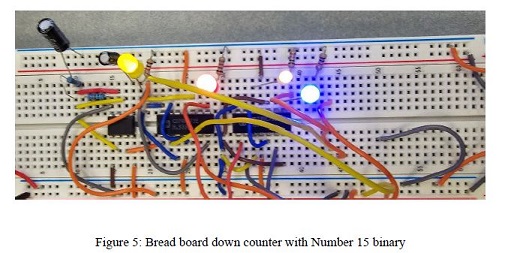
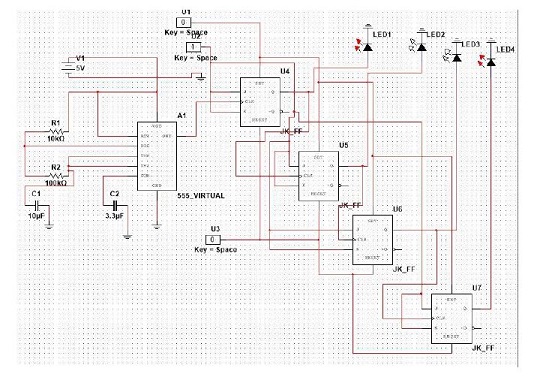
Downcounter on breadboard
In this project, I made a sequential circuit which used flipflops and a 555 timer. The 555 timer ic generated pulses to down count starting from the binary number of 15. That counted down to zero. The leds represented outputs of each binary number with a lit led being 1 and off being zero. The project was first simulated in multisim then created on the breadboard. It was a fun project seeing how the flipflops worked and how a timer can be made from only a couple of components.
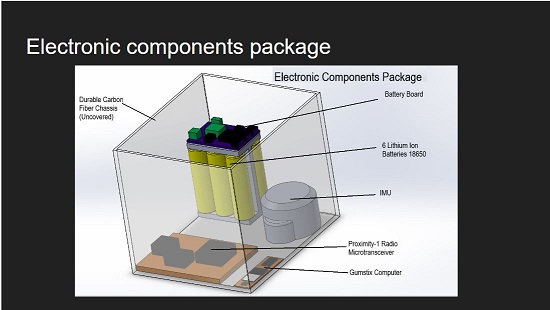
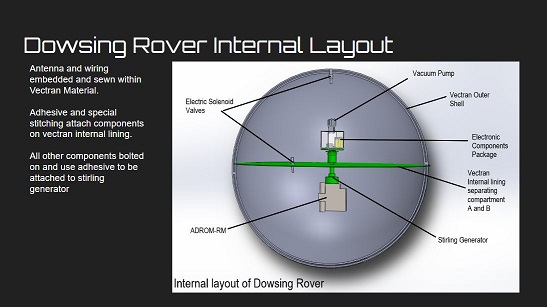
MARS dowsing mission PDR
Within NASA L'space Preliminary Design Review Certification, I was head engineer in a NASA training project to design a mission to mars to explore for possible sources of water. Within this task I worked with other students from around the US to build an entire NASA mission using nasa guides, research, and training to plan the mission. The students had different specialities resulting in teams split into their prospective strengths. I headed the design of the mars probe and descent vehicle and engineering of it because of my solidworks and 3d printing experience . Ultimately we settled on a design inspired by NASA research of a large inflatable ball probe to traverse the landscape of using martian wind power as a source of propulsion. The electronics would be powered by a small nuclear battery which powered a water sensing probe, an air compressor, sensor, gyroscopes, air valves, and sat coms, and motors to adjust the rotation of ball as it rolled around the surface of mars. The unique design allowed it to survive the entry and descent onto mars and did not require a lot of complicated motors to traverse the planet. I designed the probe and descent vehicle using solidworks cad software. The PDR covered a summary, project evolution, science value, and descent and lander criteria, activity plan, and conclusion. You can contact me for the overall plan. Overall, it was fun to research, spitball designs, and work as a team to accomplish this exercise of creating a PDR of a NASA mission.
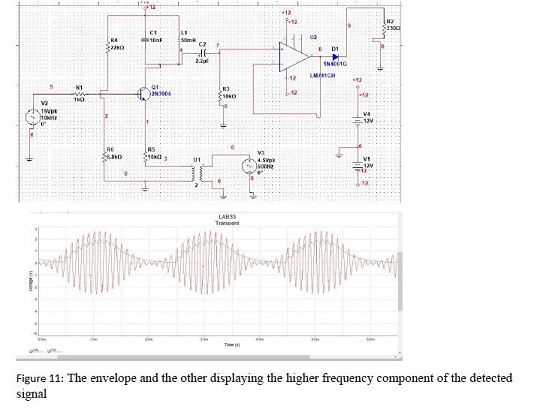
Multisim AM modulation
In this lab, a circuit was created in multisim to demonstrate amplitude modulation. An envelope detector was added to the circuit which was used to detect the AM signal. Here the output of the circuit was graphed and displayed two waveforms, one displaying the envelope and the other displaying the higher frequency component of the detected signal in figure 11.
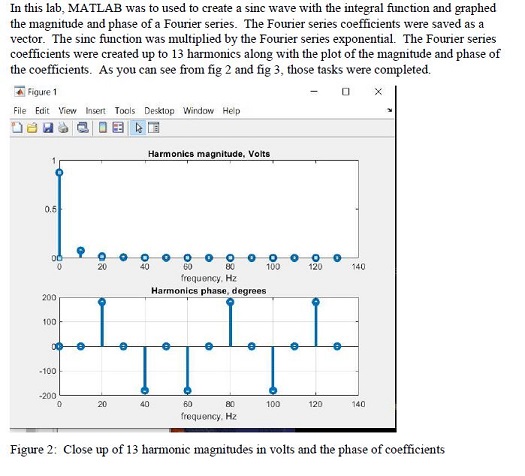
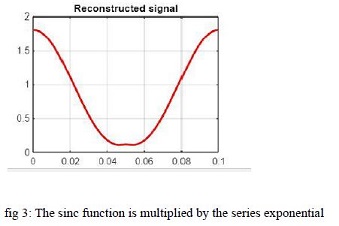
MATLAB sinc wave
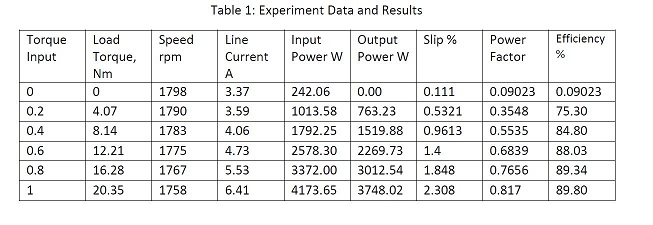
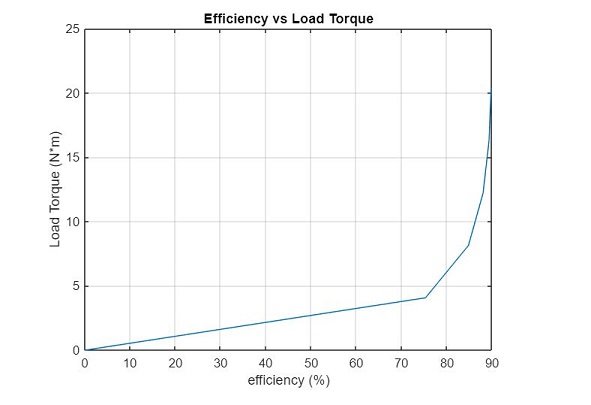
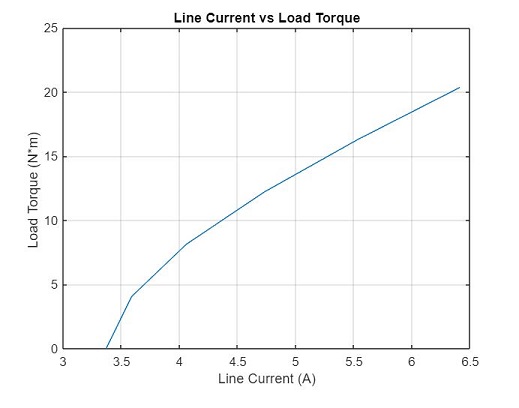
Three Phase Inductor Motor (Asynchronous Motor)
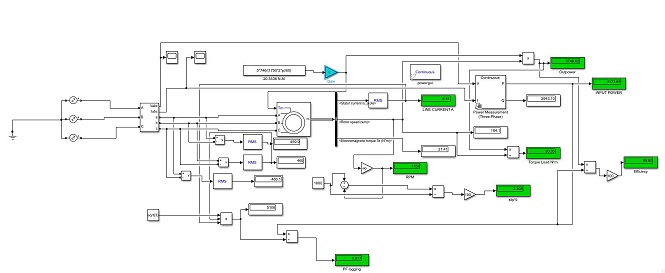
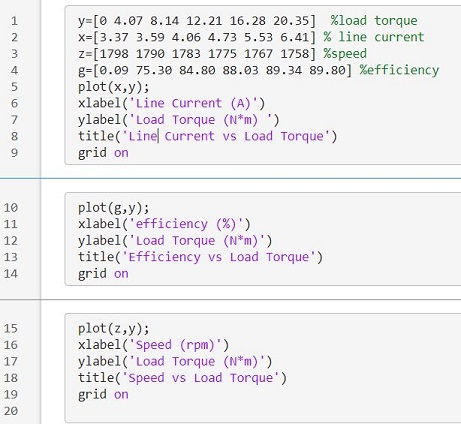
In this lab, simulink was used to create a simulation of a three phase inductor motor (Asynchronous Motor) and measured/recorded its characteristics. A table of measured characteristics is displayed under the schematic, along with graphs of Efficiency VS Load Torque and the Line Current Vs Load Torque. I included the matlab code to construct the data visualization of the simulation. Overall, this was an interesting lab seeing the effect of load torque on the characteristics of the 3-phase induction motor.
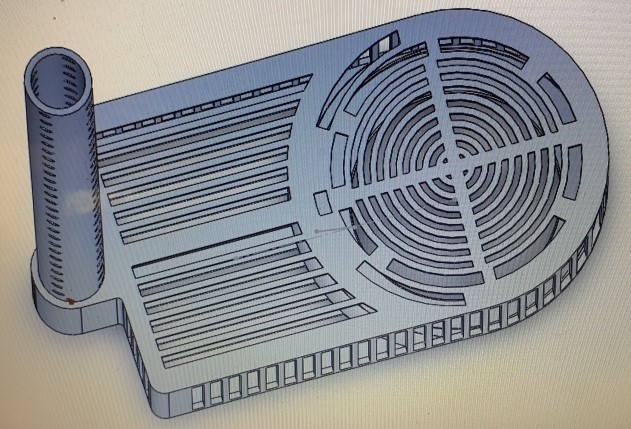
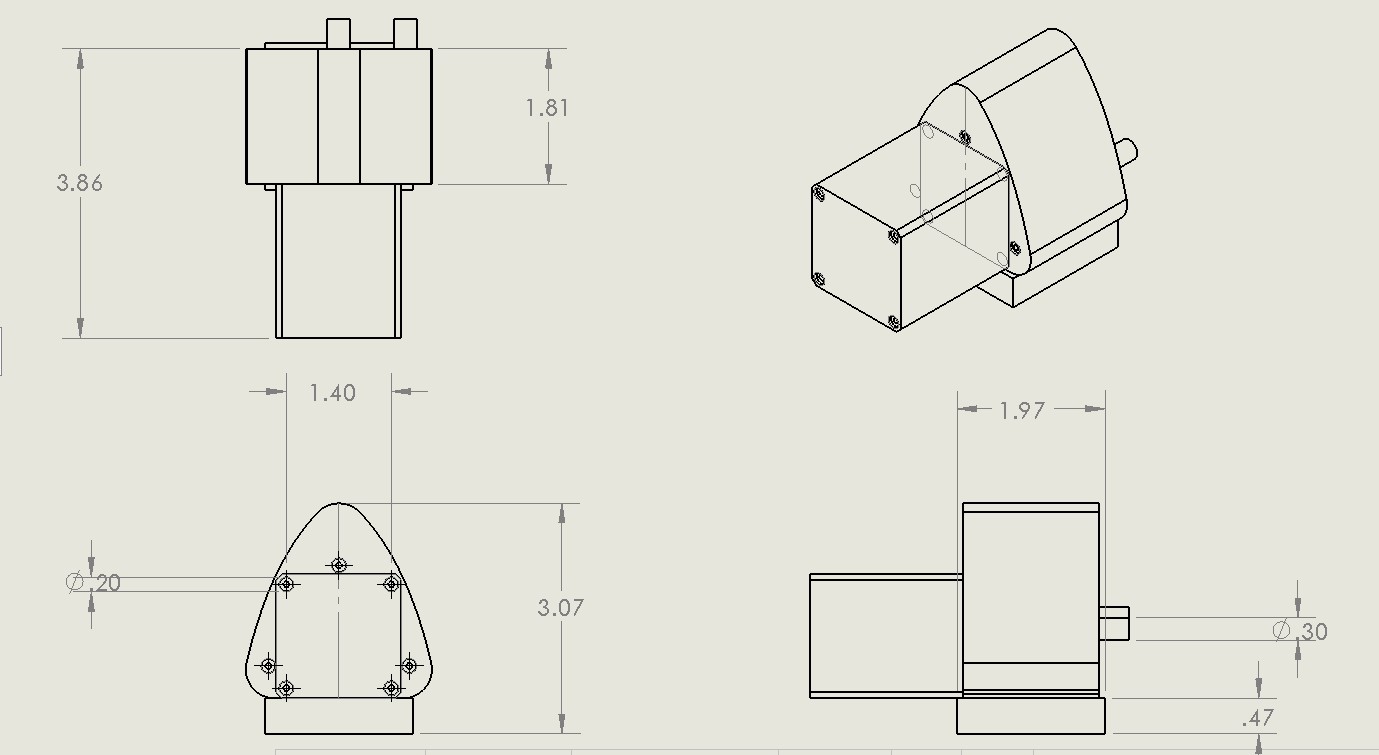
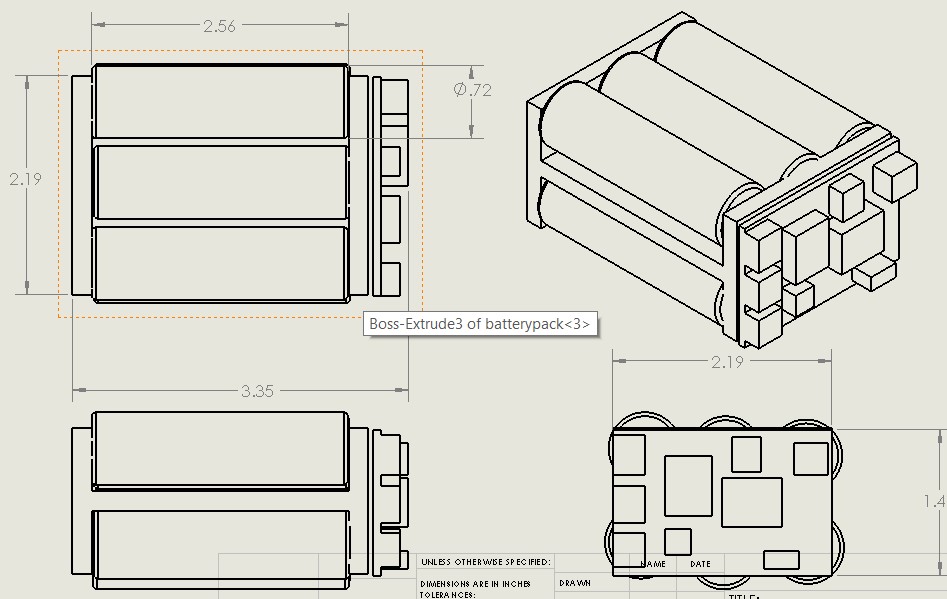
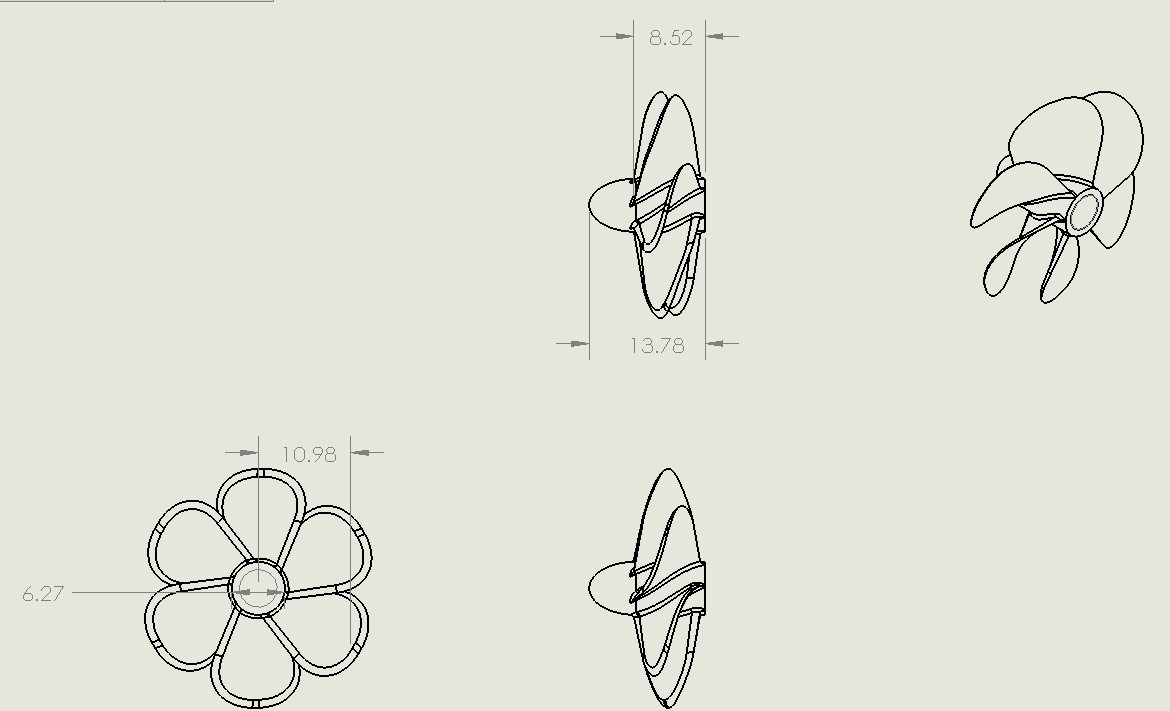
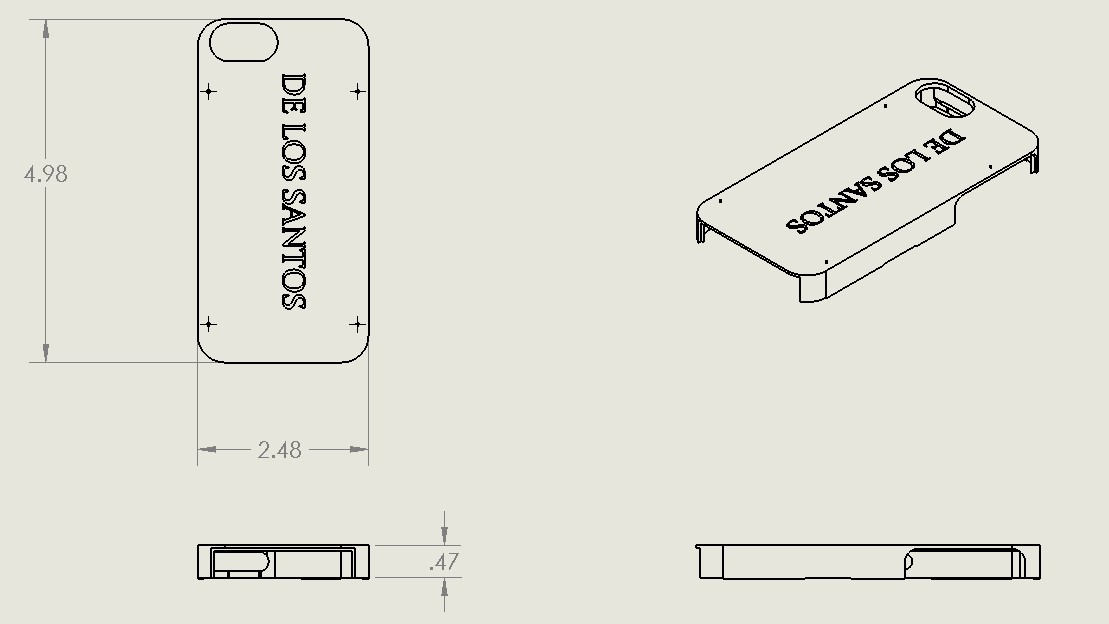
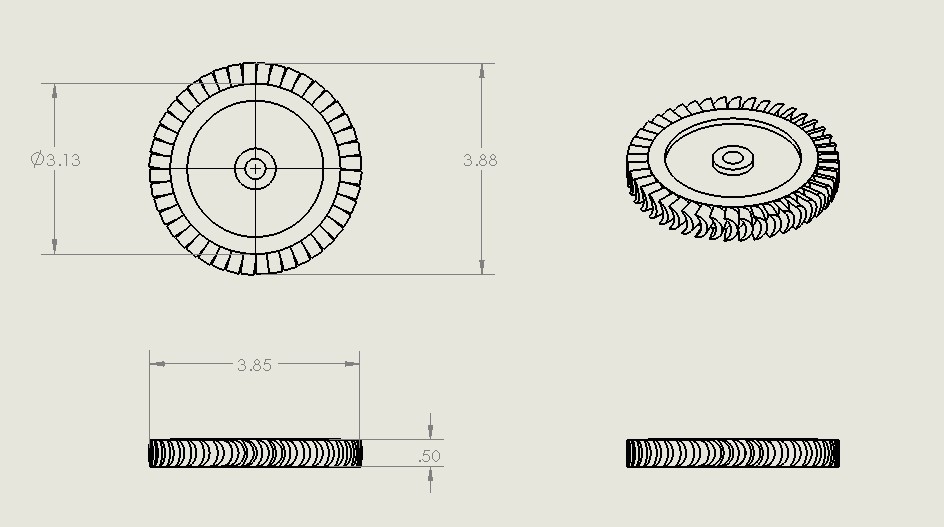
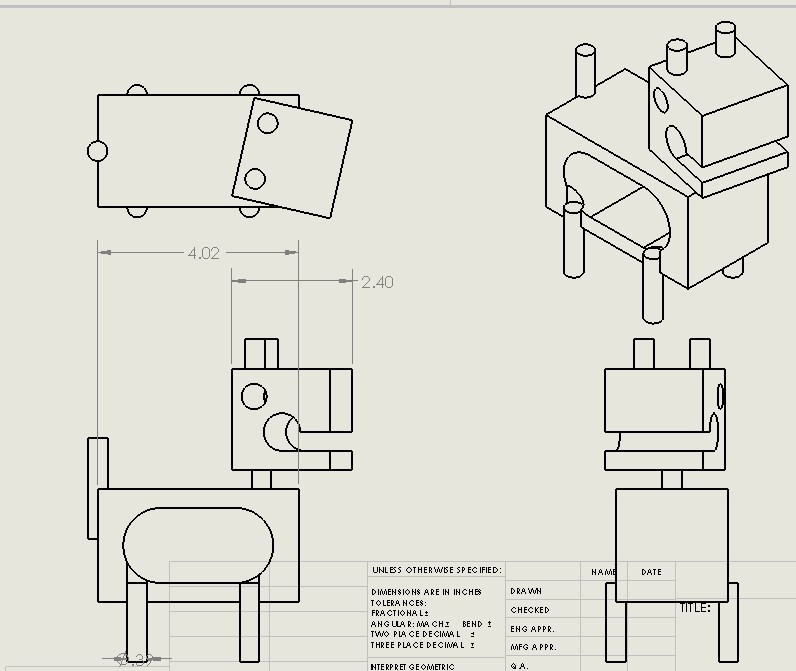
With his solidworks certification, These are various solidwork designs Robert has produced.